X-RAY RUNS: Apply for Beamtime
2017 Nov 1 - Dec 21
2018 Feb 7 - Apr 3
2018 Proposal/BTR deadline: 12/1/17
2018 Apr 11 - Jun 4
2018 Proposal/BTR deadline: 2/1/18
At CHESS, we use almost exclusively video based beam position monitors (VBPMs) to monitor and characterize the white beam coming down each beam line[1-3]. The VBPMs great advantage over the traditional white beam monitors is that they provide simultaneously beam position, profile full-width half maximum (FWHM) and intensity information about the beam. The fact that the beam can also be observed visually make the beam setup/alignment procedure much faster and easier.
Diamond VBPMs now operate at A, C, D, F3 and G2 beam lines along with Helium luminescence and X-ray scatter based VBPMs.
The Diamond VBPMs use very thin (~50µm) high quality CVD diamond plates placed perpendicularly in the white beam path. The diamond plates are made by Applied Diamond Inc. Under the X-ray excitation the diamond exhibits strong visible light luminescence giving an image of the cross-sectional footprint of the X-ray beam. The images are captured with a digital camera placed outside the beam line vacuum, looking through a viewport. The image frames are processed in real time with a custom program. Previously our VBPMs employed USB cameras each connected to computers (the video servers). These servers carried out the image processing and send data and images via LAN to Operations In addition, the processing program also provides CHESS Operations JPEG images showing the most important information about the beam condition.
Now we have combined all above mentioned functionality in a single system by using a smart camera that has an embedded operating system thus eliminating the need of a USB connection (which is a limiting factor in camera placement) and separate video server computer. The camera we have chosen is the Currera-R camera by Ximea Corp. [4]. The camera has WES 2009 (Windows Embedded Standard 2009) inside. The black-and-white model we use is capable of acquiring up to 200 frames per second. The first VBPM system with a Currera-R camera has been installed and commissioned at F3 beam line.
In Figure 1 we show the design of the F3 VBPM. The equipment is shown from the upstream point of view looking in the downstream direction. In the center if the beam pipe marked as “1” the diamond plate is shown affixed to a frame. The glow of the center part of the diamond plate is shown with as a white band. The diamond plate assembly can be moved vertically with the actuator mechanism marked as “2” The Camera “4” is outside the beam pipe is mounted on a solid stage with two 45-degree mirror mounts “3” in periscope arrangement. The camera itself is well shielded with heavy-met and lead sheets. The camera has only a network and power connection attached. The insert in this figure shows the photo of the installed camera with radiation shielding. Because the camera itself contains the operation system (Windows), no addition computer (video server) is needed in this arrangement, unlike our older USB-based VBPMs. The software control of the system is done by connection to the embedded system using the remote desktop feature of Windows.
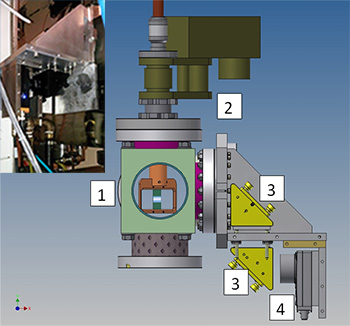
Figure 1: Layout of the smart camera VBPM at F3 beam line as viewed from the upstream direction. For clarity a number of beam line components and the camera shielding is not displayed. The photo of the actually installed camera is shown in the insert.
We have developed a specialized software for Windows using the Ximea API’s for camera control and data service. The camera software also streams acquired images to CHESS Operations displaying the most important information about the X-ray beam. In Figure 2 a screen capture of such image is shown. In it the large square in red marks the ROI (Region of Interest) where the beam positions, FWHMs and intensities are calculated on a frame-by-frame basis. The small cross marks the current beam position and the small square represents a 1x1 mm mark of the location of the “ideal” beam position. The image also shows the beam profile and position trace as well as the position value and signal name on the title bar. The position values provided by the VBPM are given in microns. The positions are calculated from the pixel intensity centroid in the ROI in pixel units and converted to microns. The pixel-to-micron conversion constants are determined at setup times and they basically depend on the field of view of the camera and its pixel number. The beam intensity values are the intensity integrals within the ROI and reported in units of mA. The conversion constant of the integrated pixel intensities to mA is determined by cross-calibration with the electron/positron currents at startup times.
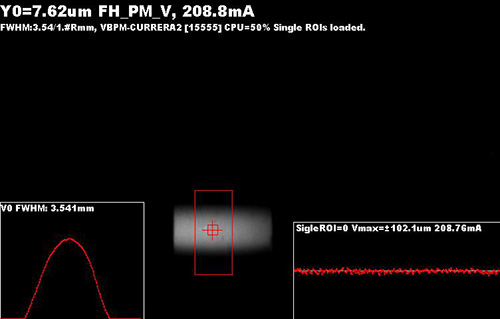
Figure 2: JPEG generated by the image acquisition program running in the embedded OS of the camera. It show all important imformation calculated by the program.
The screen dump of camera control dialog box is shown in Figure 3. It contains most of the many camera settings and calculation parameters. The camera control dialog box allows the CHESS operator to define the ROIs, to set the image acquisition parameters, to calibrate the position and intensity calculations, and to set display and image saving parameters.

Figure 3: The camera control dialog box.
References:
[1] Peter Revesz, Jeffrey A. White, Nucl. Instr. and Meth. A, 540, 470 (2005).
[2] Peter Revesz, Alexander B. Temnykh, Alan K. Pauling, Nucl. Instr. and Meth. A, 621, 656 (2010).
[3] Peter Revesz, Alexander B. Temnykh, Alan K. Pauling, Nucl. Instr. and Meth. A, 649, 94 (2011).
[4] http://www.ximea.com/en/machine-vision/smart-camera
Submitted by: Peter Revesz and Alan Pauling
CHESS, Cornell University
02/25/2014