X-RAY RUNS: Apply for Beamtime
2017 Nov 1 - Dec 21
2018 Feb 7 - Apr 3
2018 Proposal/BTR deadline: 12/1/17
2018 Apr 11 - Jun 4
2018 Proposal/BTR deadline: 2/1/18
The X-ray beam position stability is one basic requirement to get high quality experimental results. Long duration (tens of minutes to hours) X-ray beam position shifts have been present due to warm-ups after beam interruptions and as a result of changes due to the temperature shift of the CESR environment. These beam position shifts, especially during start-up times could be as large as hundreds of microns and the warm-up time as long as 12 hours.
The X-ray white beam position measurement at CHESS relies on unique video beam position monitors (VBPMs). VBPMs use digital cameras to capture images of luminescence of the material (gas or thin diamond screen) as the beam passes through. The beam position is calculated based upon the centroid position of the pixel intensity map. For sub-micron position measurement precision usually tens of video frames are averaged before computations. The CHESS VBPM system provides, in addition to beam position, size and intensity data, a visual view of the beam which proved to be very useful for CHESS operators for beam alignment procedures. The VBPM system provides live data for CHESS and CESR operations as well as for the CHESS data archiving system at the level of 1 Hz frequency. Even though the repetition rate of 1 Hz provided by the VBPMs is much slower than some other types of BPMs, it is a good fit when it comes to correcting for slow beam position changes.
In Figure 1, the schematic layout of the CHESS VBPM system and its connection to CESR systems for position feedback control is shown. The VBPM cameras (12 cameras for all CHESS beam lines) are located in the Tunnel inside the shielding wall. Each of these cameras is connected to a video server (a Windows laptop) to process the captured images and send the data and images to CHESS Operations via LAN. In CHESS Operations data from all VBPMs are collected and sent for archiving. At the same time, all relevant position data are transmitted to CESR Operation using and EPICS-based system.
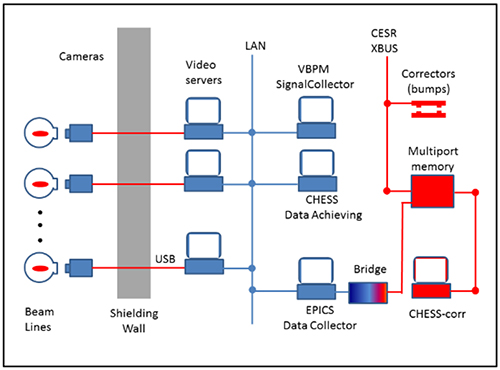
Figure 1: Schematic layout of the CHESS VBPM and the CESR position feedback control systems.
On the CESR control side the X-ray beam position data first enter the Multiport memory (MPM) and then are used for correction calculations by the CHESS-corr program. The actual orbit corrections are done by creating bumps using a number of corrector elements along the CESR ring.
The CHESS corrections program uses an optimization method, originally implemented by Stu Peck, of trying 40000 iterations of randomized bump configurations. Each iteration randomly picks roughly half of the allowed bumps to change by a random amount, and calculates the figure of merit (described below). When the figure of merit is minimized, it tries smaller steps around those bump values to fine-tune the result.
The bumps used in the correction are a combination of local bumps and "wave" bumps. The local bumps typically use three vertical steerings near the individual beam line source points to form a closed bump. The wave bumps use vertical steerings which are outside the CHESS source point region to launch multiple betatron wavelength bumps through either of our two CHESS source regions for electrons and positrons.
There are three contributions to the figure of merit: (1) the sum of the values of the CHESS x-ray positions relative to the target position values, (2) the sum of the absolute values of the CHESS bump changes from their starting values, and (3) the vertical steering value closest to its limit, if above a user-specified threshold. The operator of the CHESS-corr program can set weights for the last two contributions, including choosing not to include them at all. The target position values for each beam line are set by CHESS operators when the X-ray beam positions are considered to be closest to ideal.
In Figure 2 the beam position traces for F-lines are shown without and with feedback correction by the CHESS-corr program during a time period over 200 hours. In the lower part of the Figure the electron and positron currents are shown. The positron current was topped off in every few minutes so it stayed virtually constant while the electron current was refilled in every 2 hours or so. During this time the electron current decayed for ~200mA to ~175mA. In this figure, outlier data points corresponding to times when electron beam refills were made, when no data is being collected by users, have been removed for clarity. The part on the left side of the figure (no feedback correction during positron top-ups) shows large scale beam position drifts. This part contains several instances when beam interruption occurred. After these beam interruptions, one-time beam position corrections have been applied to avoid further drifts. The right side of the figure shows the interval passed the warm-up period when regular 3 minute feedback corrections by the CHESS-corr program have been applied to stabilize the beam. The plot displays a long (over 200 hours) time period.
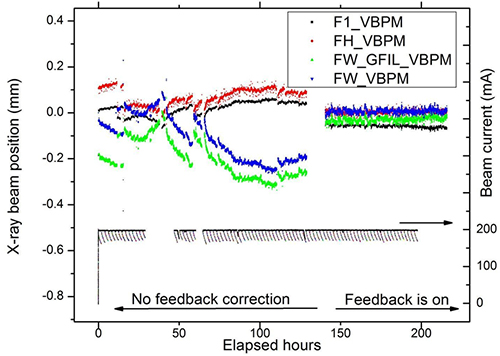
Figure 2: X-ray Beam position traces for CHESS beam F-lines with position correction OFF and ON. The positrons topped off in every few minutes, the electrons refilled in every two hours.
At the beginning of the warm-up shift and after each electron injection we run a large correction iteration, putting no weight on the bump changes, to get the best possible configuration to start with. Then, automatic three-minute corrections are applied after every positron injection, now including two additional figure of merit contributions: a weight on how much a given bump is allowed to change, and a weight on keeping individual steerings below an arbitrary percentage of their maximum strengths. These contributions allow the bumps and steerings to change enough to keep up with the position drift, but do not allow large jumps. The values for the weights were determined by experimentation. Contributions from non-responsive VBPMs can be vetoed in the CHESS-corr program.
As a result of implementing this scheme of beam position correction we have virtually eliminated the need to run the machine for 8-12 hours to sufficiently warm it for stable beams for experimentation. Now beam interruptions can be recovered from very quickly. Another advantage is that initial alignments after weekly maintenance periods are very quickly increasing the beam time available for setup, staff development and users.
Submitted by:
Peter Revesz, Chris Conolly, Michael Forster, Laurel Bartnik
CHESS, Cornell University
05/27/2014