X-RAY RUNS: Apply for Beamtime
2017 Nov 1 - Dec 21
2018 Feb 7 - Apr 3
2018 Proposal/BTR deadline: 12/1/17
2018 Apr 11 - Jun 4
2018 Proposal/BTR deadline: 2/1/18
Combinatorial thin film research can comprise hundreds of samples grown with slightly different compositions or processing conditions. CHESS summer student Arthur Campello tackled the task of designing a sample changing robot for CHESS D1 station, under the guidance of CHESS Staff Scientist Detlef Smilgies. The basic ingredients of the robot were a rotation stage as a sample carousel and a slim translation stage for the sample transfer. A suction device lightly picks up the sample in one of the 20 slots on the sample carousel. Then the translation stage transports the sample to the sample holder. Campello designed the basic structural components based on beamline dimensions and the available stages. In addition, volunteer Maximilian Stein made some essential modifications, in order for the robot to fit the crammed space around the sample, when running in GIWAXS mode.
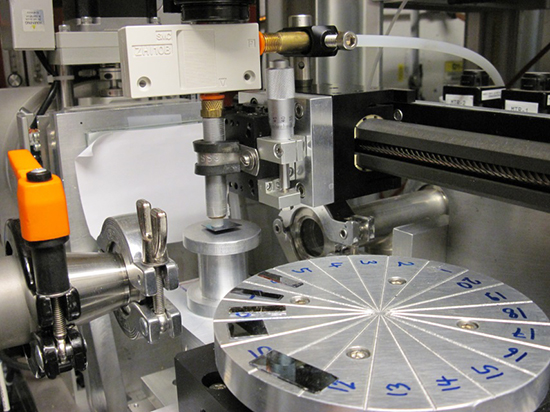 Figure 1: D-line sample robot in action. A test sample was just picked up and transferred to the sample stage to be dropped off.
Figure 1: D-line sample robot in action. A test sample was just picked up and transferred to the sample stage to be dropped off.
The challenge was to identify a suitable suction system for picking up the samples for transfer. Suction should be gentle as not to damage the films, but on the other hand there should be sufficient airflow so that even a slightly misplaced sample would be safely held. The latter also ensures that a variety of sample shapes can be accommodated. After first attempts with air picks and small vacuum cleaners, Smilgies settled on an air-actuated Venturi pump in combination with a solenoid valve. In addition Smilgies developed a SPEC macro set to facilitate sample change by just issuing a single command.
The Kowalewski group from Carnegie Mellon’s Chemistry Department volunteered to be the guinea pigs for testing the robot in a real user experiment. The team lead by senior graduate student Andria Fortney successfully transferred a total of about 300 samples for GIWAXS and GISAXS experiments with high reliability. All group members appreciated that the opening and closing of the heavy D1 hutch door was cut down by a factor of ten to twenty, depending on the size of the sample set mounted on the robot. A bit of fine tuning the robot will still be necessary, but D1 now has a working prototype.
Submitted by: Detlef Smilgies, CHESS, Cornell University
05/10/2017